AI4ESS 2020:决策树和它们的森林
本文翻译自 AI4ESS 2020 课程,并有部分修改
Artificial Intelligence for Earth System Science (AI4ESS) Summer School
Decision Trees and Their Ensembles
Ryan Lagerquist - NOAA
理论
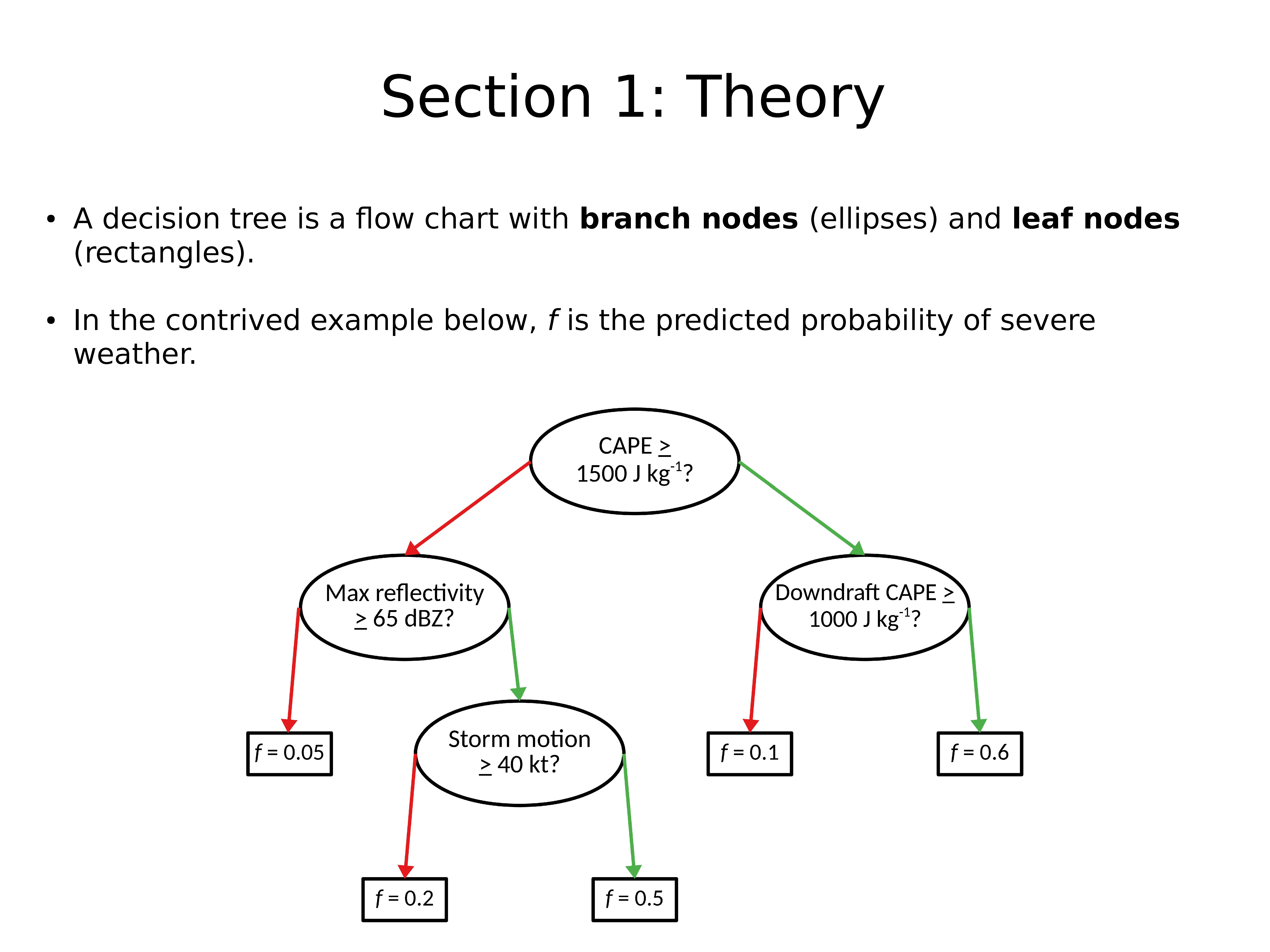
决策树是具有分支节点(椭圆)和叶节点(矩形)的流程图。
在上面的示例中,f 是极端天气的预测概率。
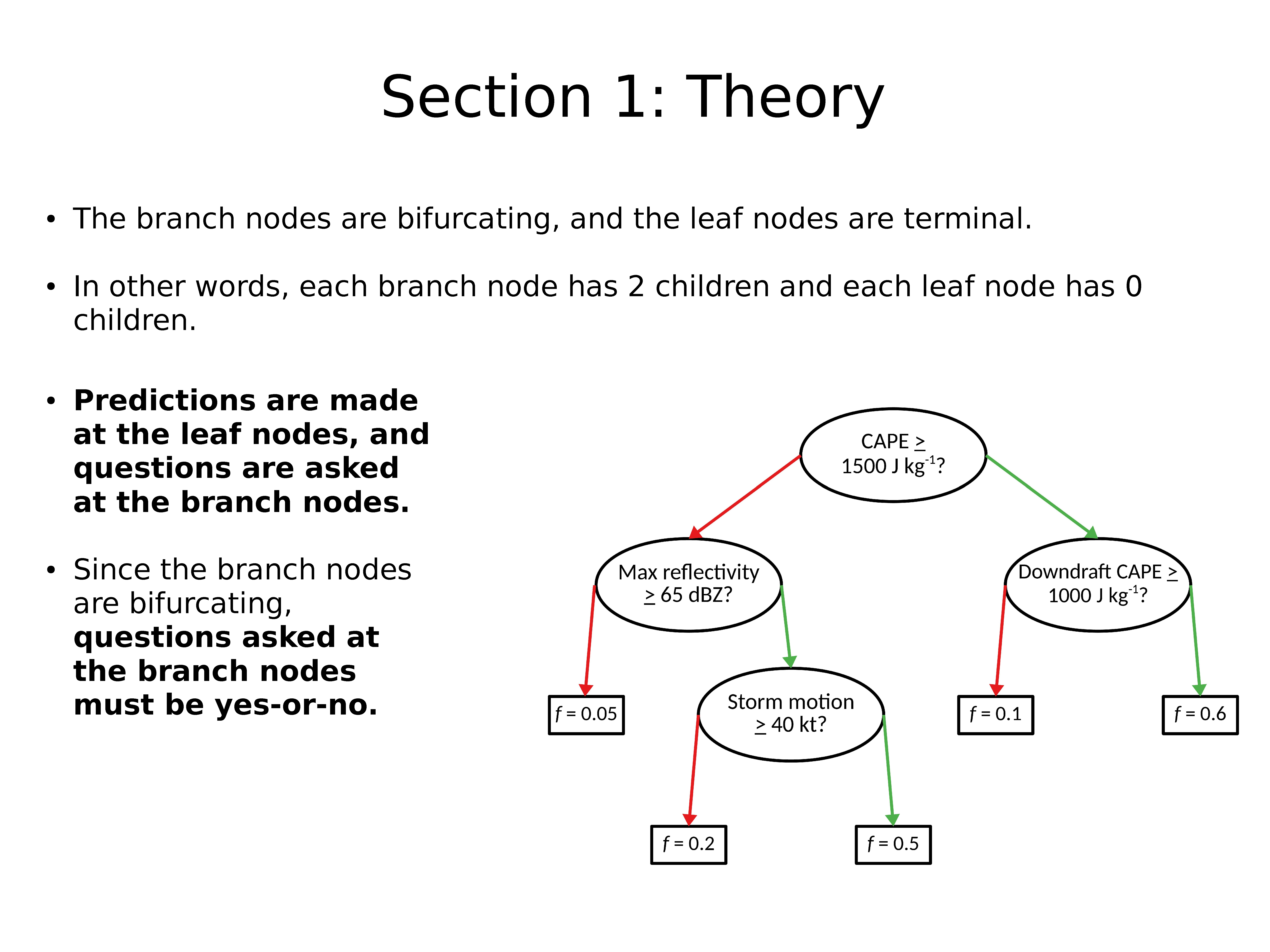
分支节点是分叉的,叶子节点是终止点。
换句话说,每个分支节点有 2 个子节点,每个叶子节点有 0 个子节点。
在叶子节点进行预测,并在分支节点提出问题。
由于分支节点是分支的,因此在分支节点处提出的问题必须为是或否。
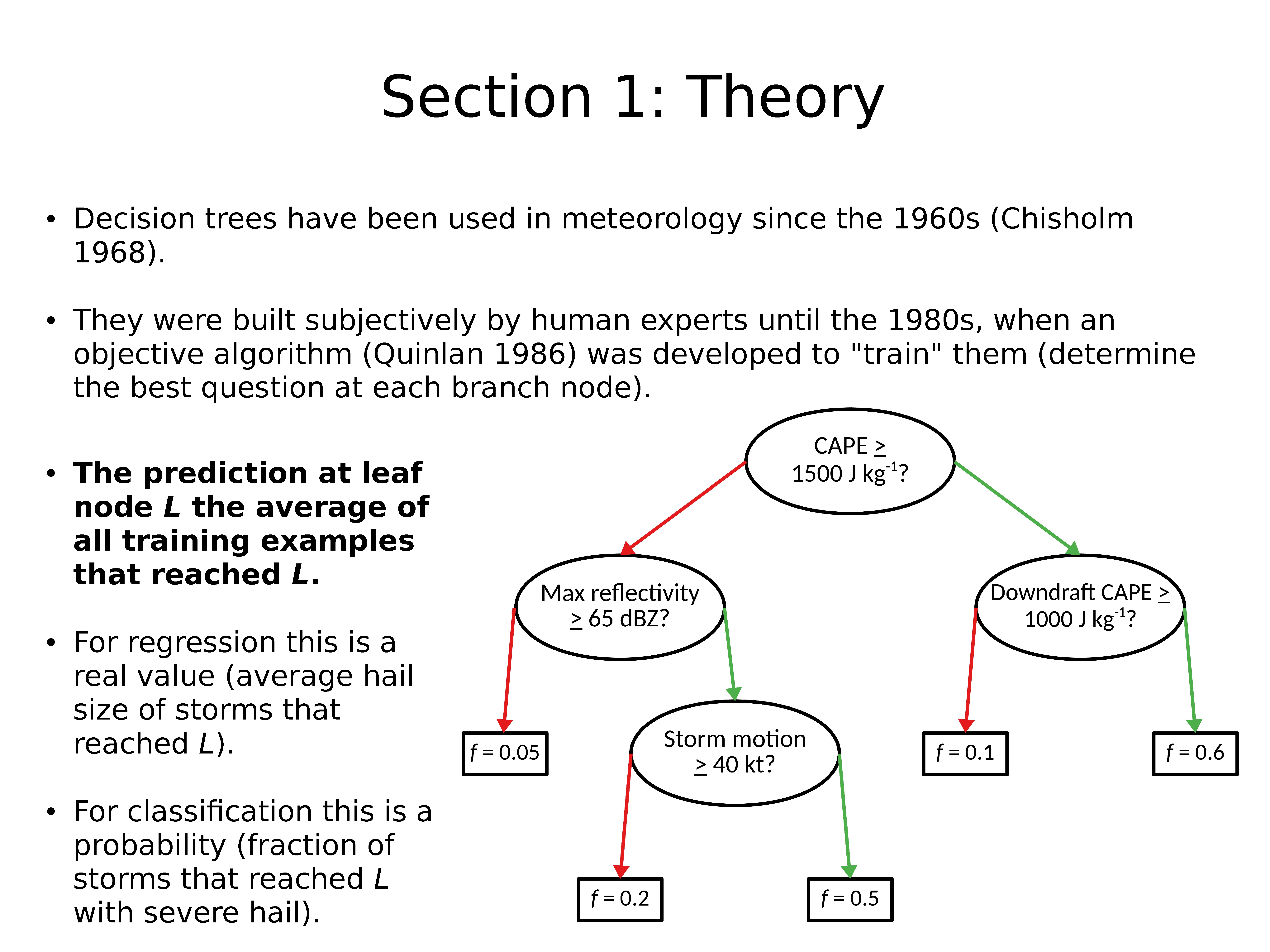
自 1960 年代以来(Chisholm 1968),决策树已用于气象学。
它们由人类专家主观构建,直到 1980 年代,当时开发了一种目标算法(Quinlan 1986)来 “训练” 它们(确定每个分支节点的最佳问题)。
叶节点 L 处的预测是达到 L 的所有训练样本的平均值。
对于回归,这是一个真实值(达到 L 的平均冰雹大小)。
对于分类,这是一个概率(严重冰雹达到 L 的暴风的分数)。
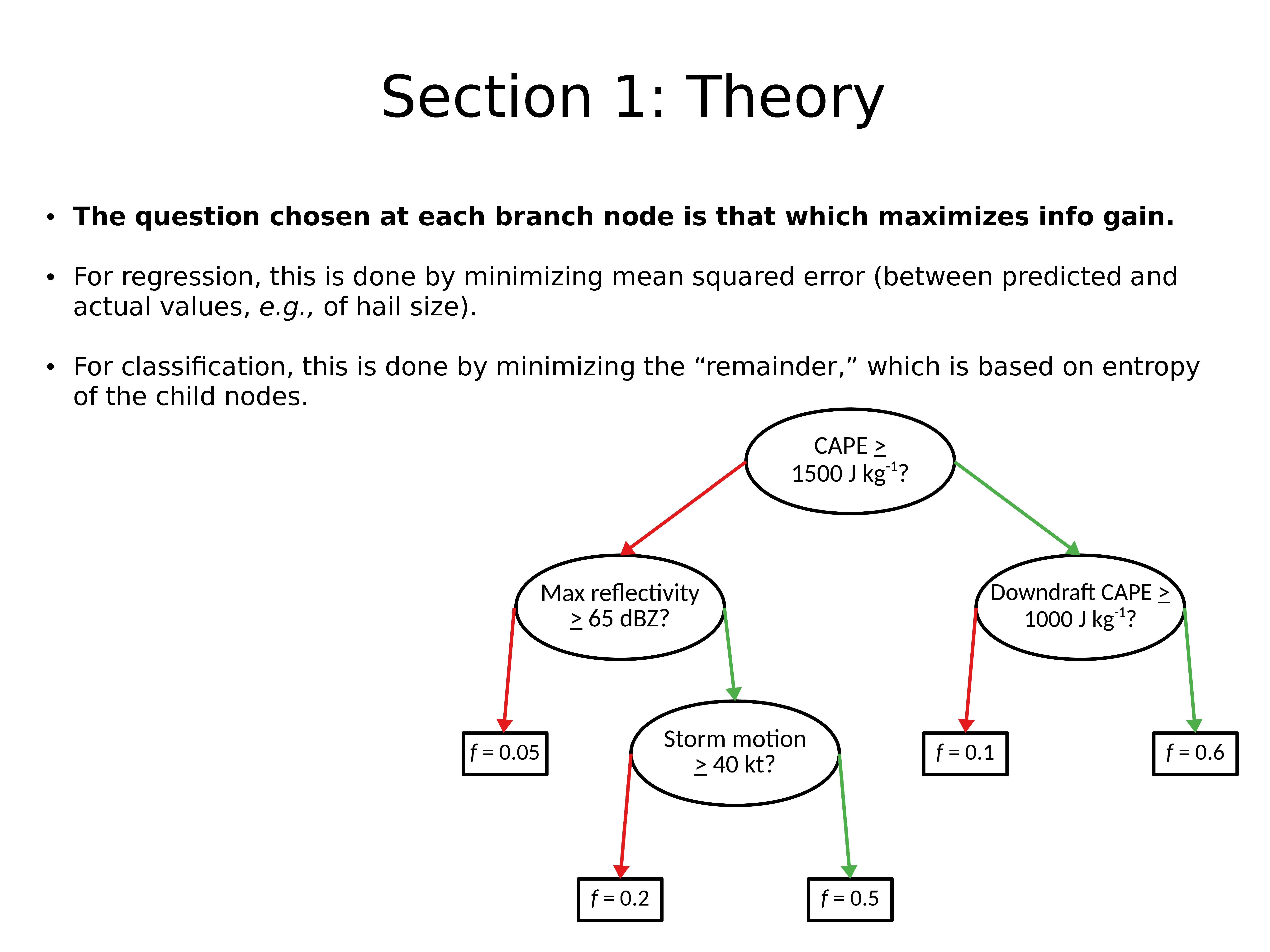
在每个分支节点处选择最大化信息增益的问题。
对于回归,这是通过最小化均方误差来实现的(在预测值和实际值之间,例如冰雹大小)。
对于分类,这是通过最小化 remainder 来完成的,remainder 是基于子节点的熵的。
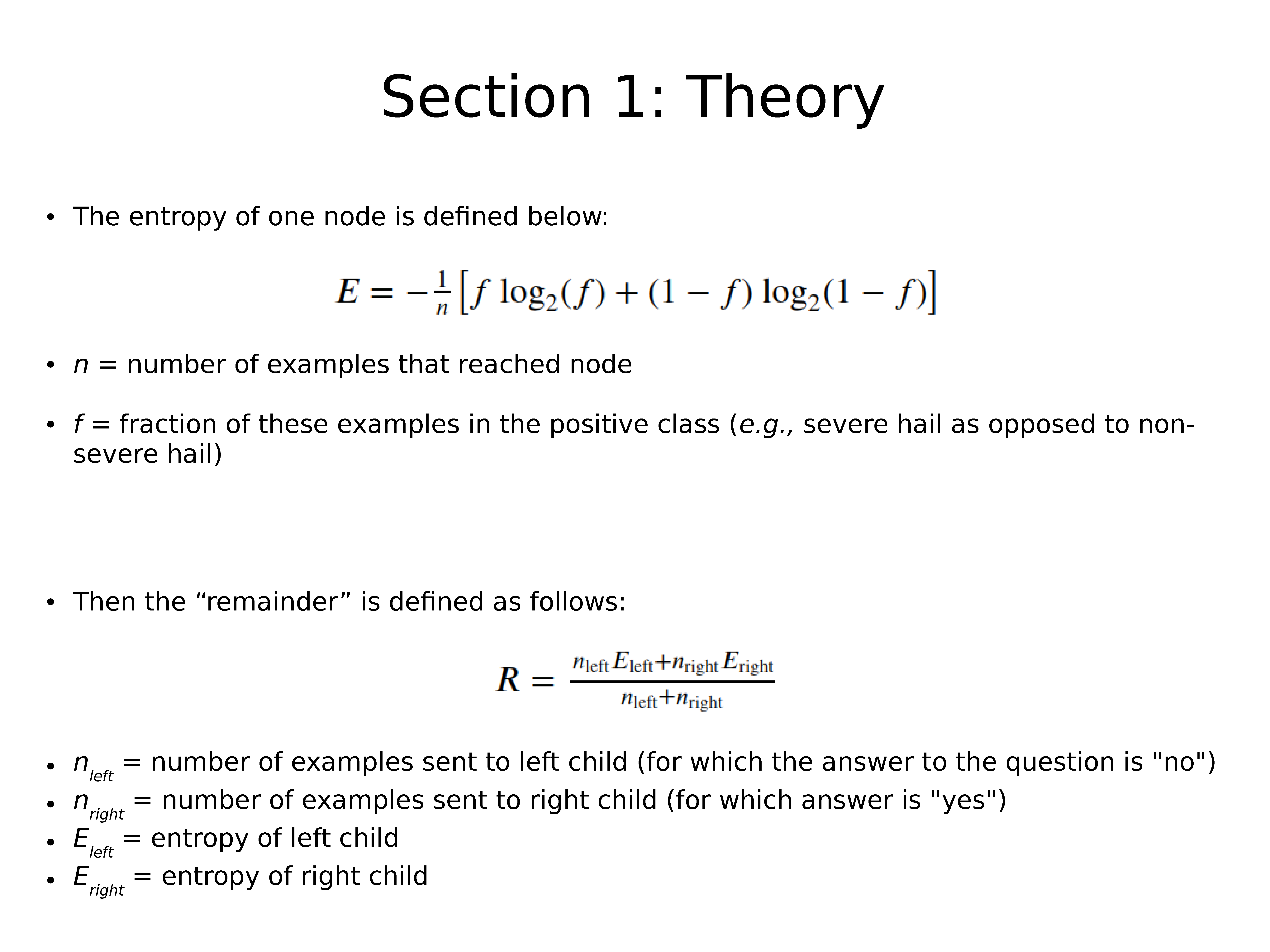
一个节点的熵定义如下:
\begin{equation*} E=-\frac {1} {n}[\boldsymbol{f}log_{2}(\boldsymbol{f}) + (1-\boldsymbol{f})log_{2}(\boldsymbol{f})] \end{equation*}
其中:
n 是到达该节点的样本个数
f 是这些样本中属于积极类别的分数(例如,严重冰雹而不是非严重冰雹)
那么,remainder 定义如下:
\begin{equation*} \boldsymbol{R} = \frac {n_{left}E_{left} + n_{right}E_{right}} {n_{left}+n_{right}} \end{equation*}
其中:
n_left 是发送给左子节点的样本数(问题的答案为 “否”)
n_left 是发送给右子节点的样本数(问题的答案为 “是”)
E_left 是左子节点的熵
E_right 是右子节点的熵
默认决策树

下面显示的是使用 Python 训练的默认决策树训练数据的结果。
使用默认的输入参数,通过 sklearn.tree.DecisionTreeClassifier 训练树。
(代码)
这棵树被训练用于预测暴风雨将来是否会形成强烈的旋转(涡度 > 0.00385s-1)。
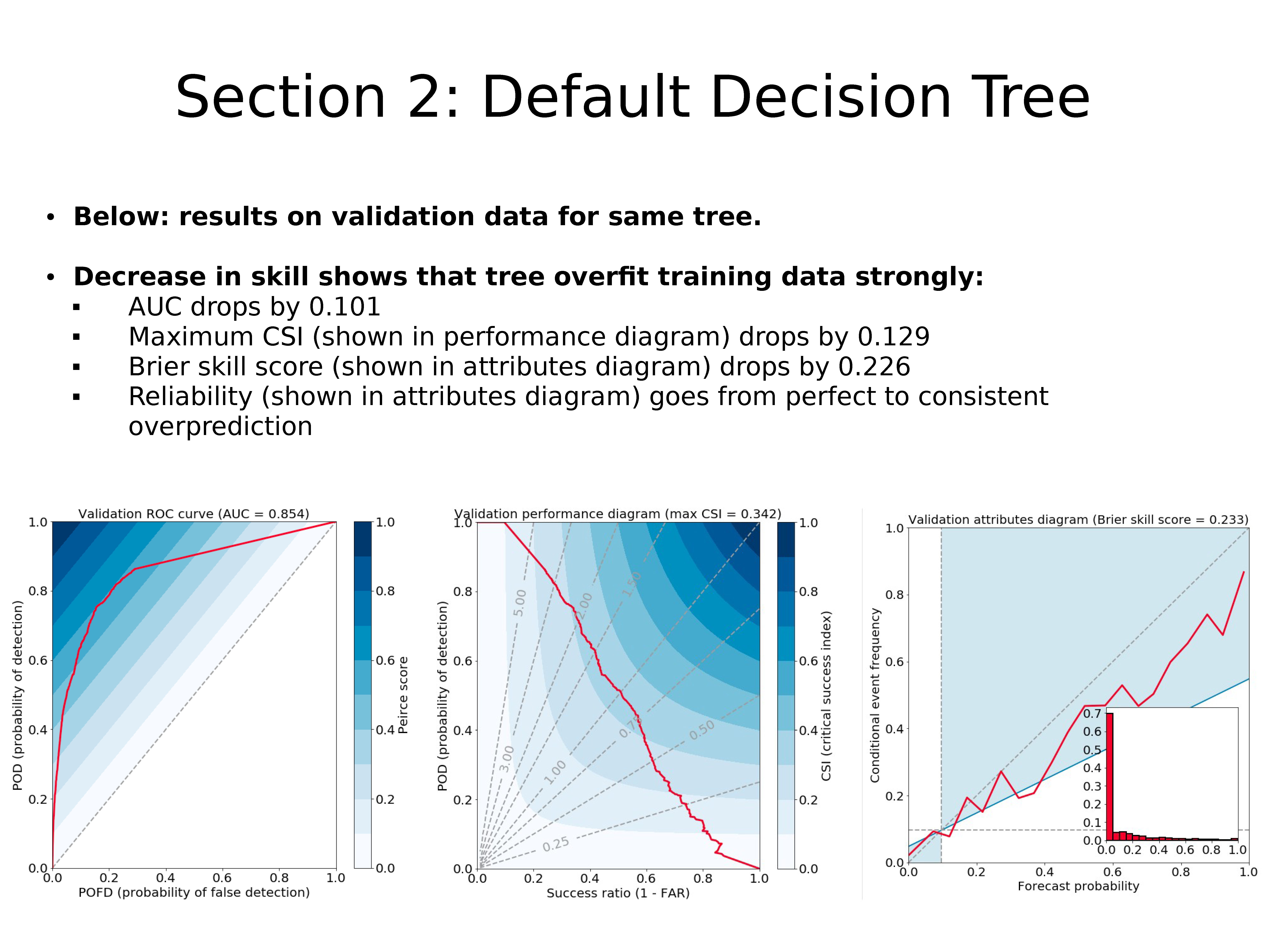
上图:同一棵树在验证数据上的结果。
技巧降低表明该决策树严重过拟合训练数据:
- AUC 降低 0.101
- 最大 CSI(如性能图所示)下降 0.129
- Brier 技巧评分(显示在属性图中)下降了 0.226
- 可靠性(如属性图所示)从完美变成连续过度预测
更理想的决策树

可以通过限制树的深度来控制过拟合。
两个超参数(以及其他)控制决策树的深度:
- 分支节点的最小样本数
- 叶子节点的最小样本数
如果两个值都设置为 1,则树可能会变得很深,从而更容易过拟合
您可以换种方式思考:
- 如果每个叶节点只有一个示例,则所有预测将仅基于一个训练示例
- 这些预测可能不会很好地推广到训练数据之外
如果最小样本量太大,则树的深度不够,导致欠拟合
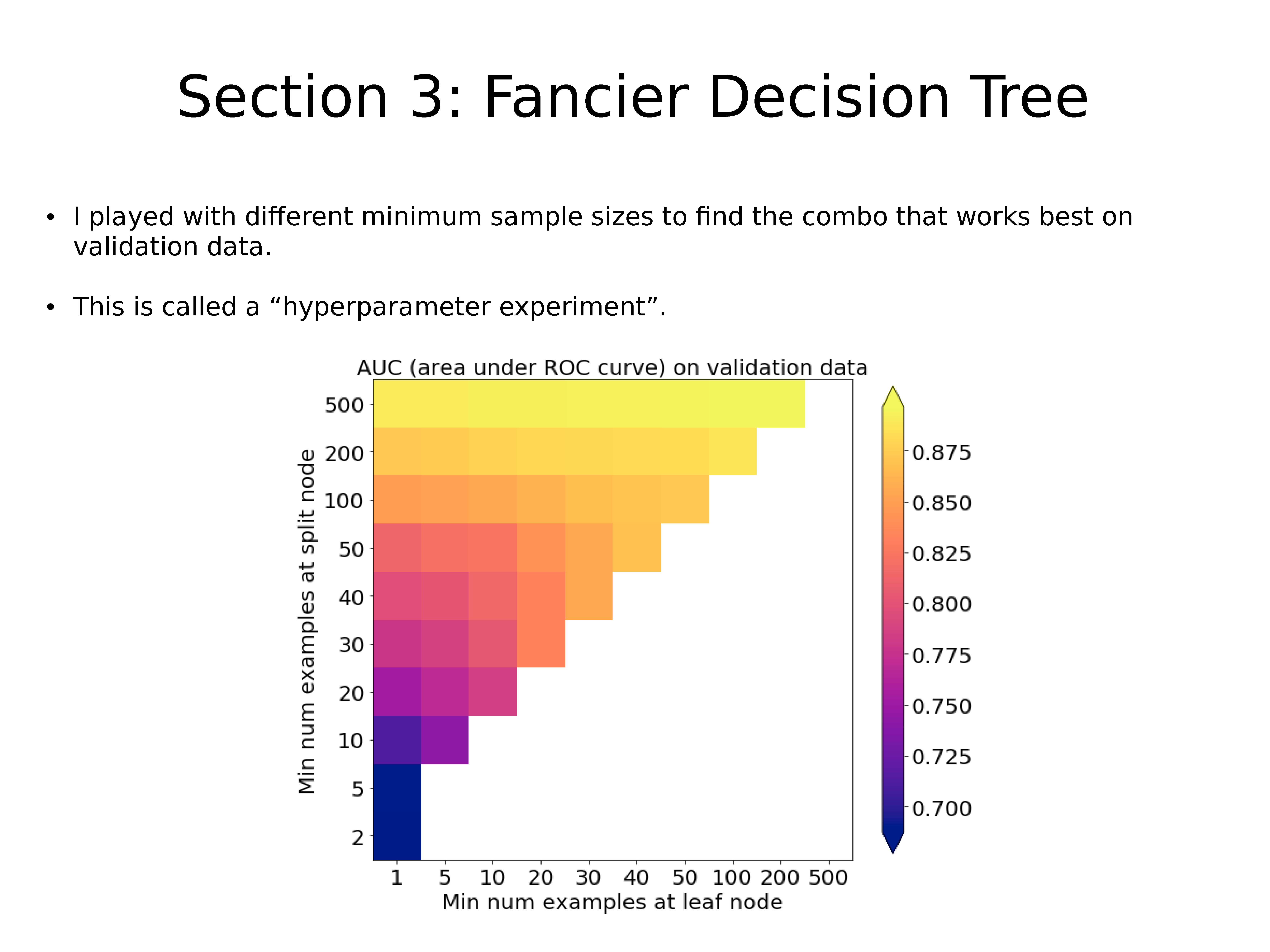

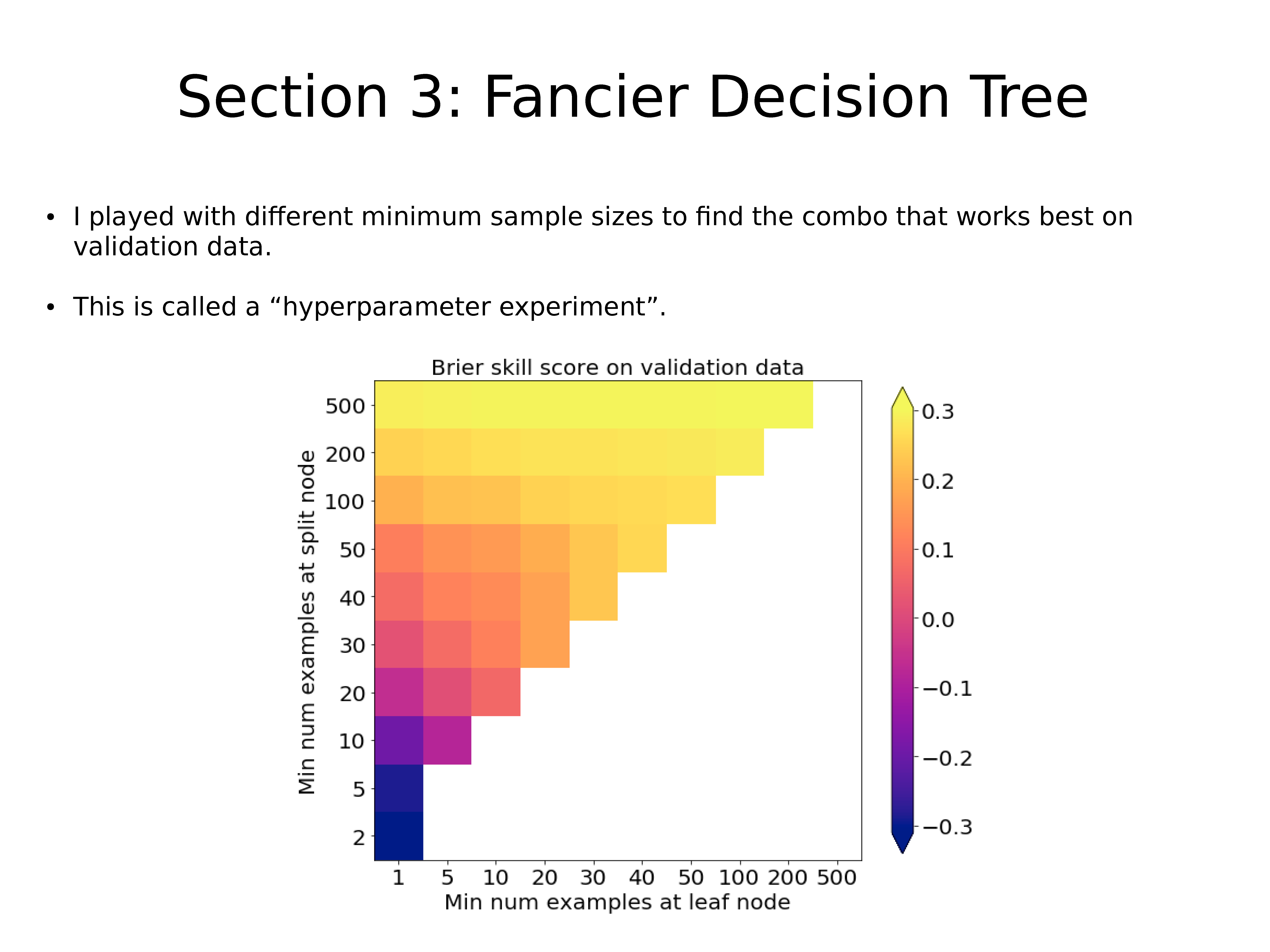
作者使用了不同的最小样本数,以找到最适合验证数据的组合。
这称为 “超参数试验”。
作者选择了具有最佳(最高)验证 BSS 的树:
- 分支节点最小样本数 = 500
- 叶子节点样本数 = 200
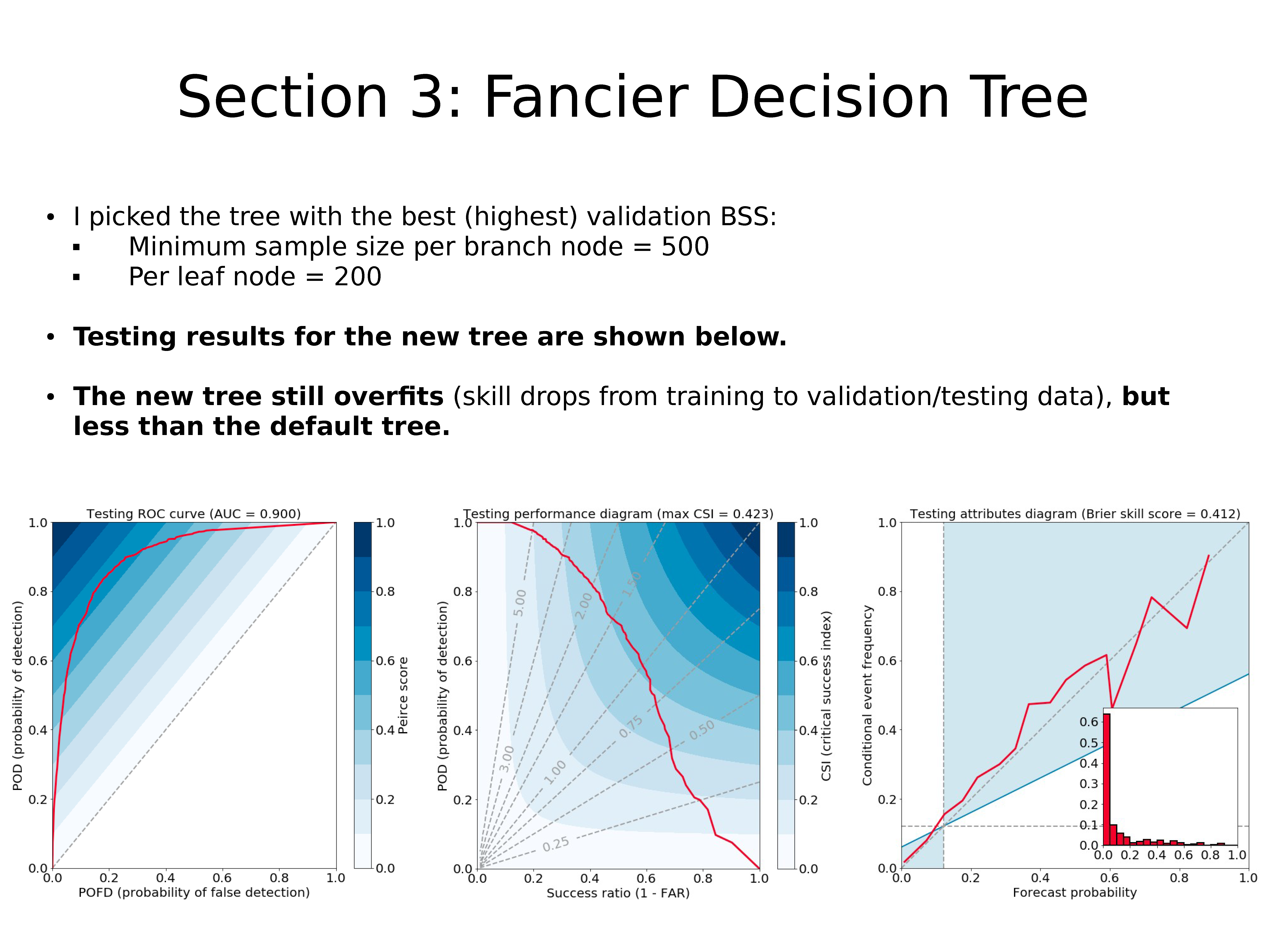
上图显示了新决策树的测试结果。
新树仍然过拟合(技巧从训练到验证/测试数据有所下降),但少于默认树。
随机森林
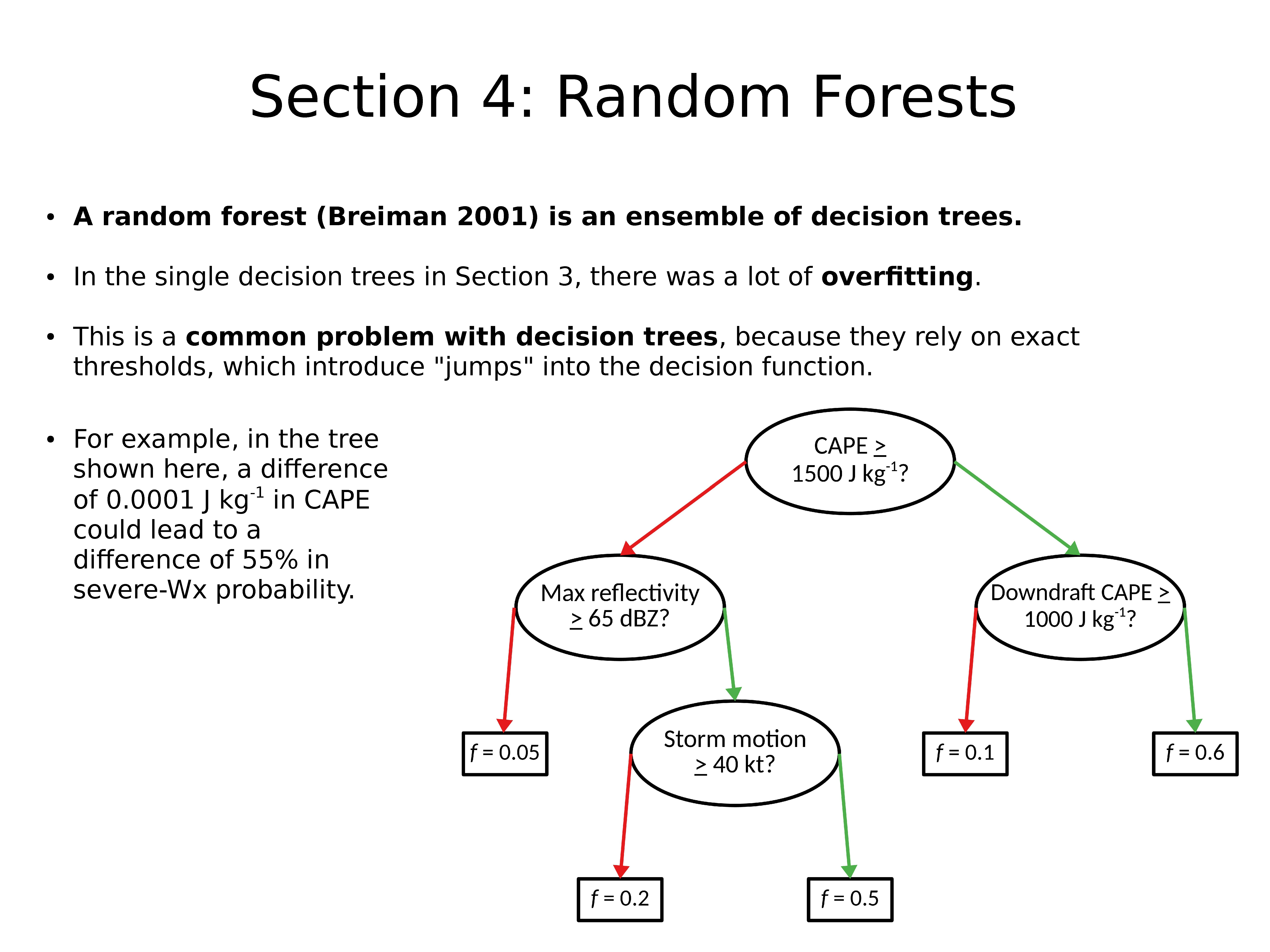
随机森林(Breiman 2001)是决策树的集合。
在上一节的单个决策树中,存在很多过拟合问题。
这是决策树的常见问题,因为它们依赖于精确的阈值,这会在决策函数中引入“跳跃”。
例如,在此处显示的树中,CAPE 中的 0.0001 J kg-1 差异可能导致 severe-Wx 概率差异 55%。
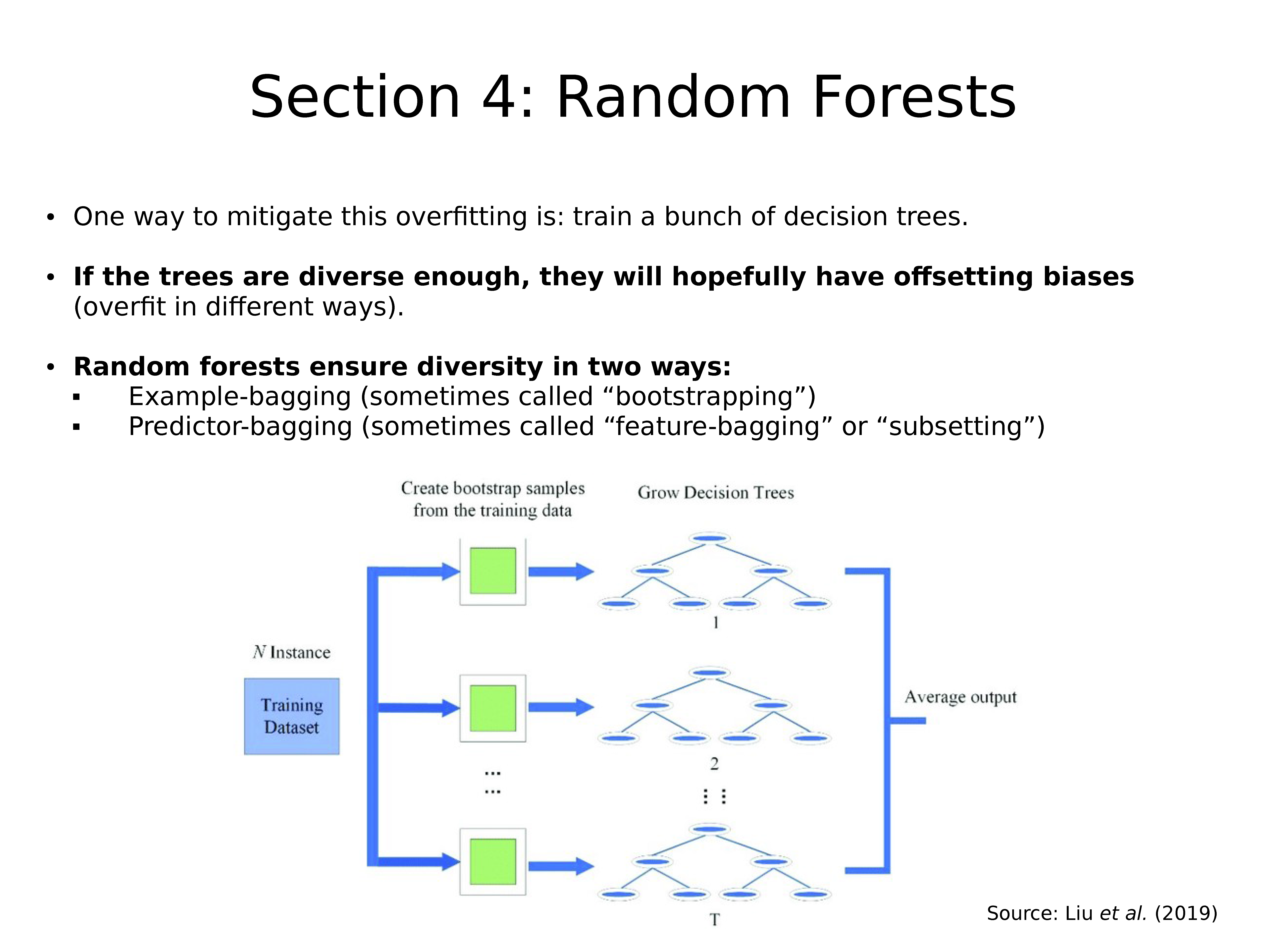
减轻这种过拟合的一种方法是:训练一组决策树
如果树木足够多样化,则希望它们具有抵消的偏差(以不同方式过拟合)。
随机森林通过两种方式确保多样性:
- Example-bagging (有时被称为 “bootstrapping”)
- Predictor-bagging (有时被称为 “feature-bagging” or “subsetting”)
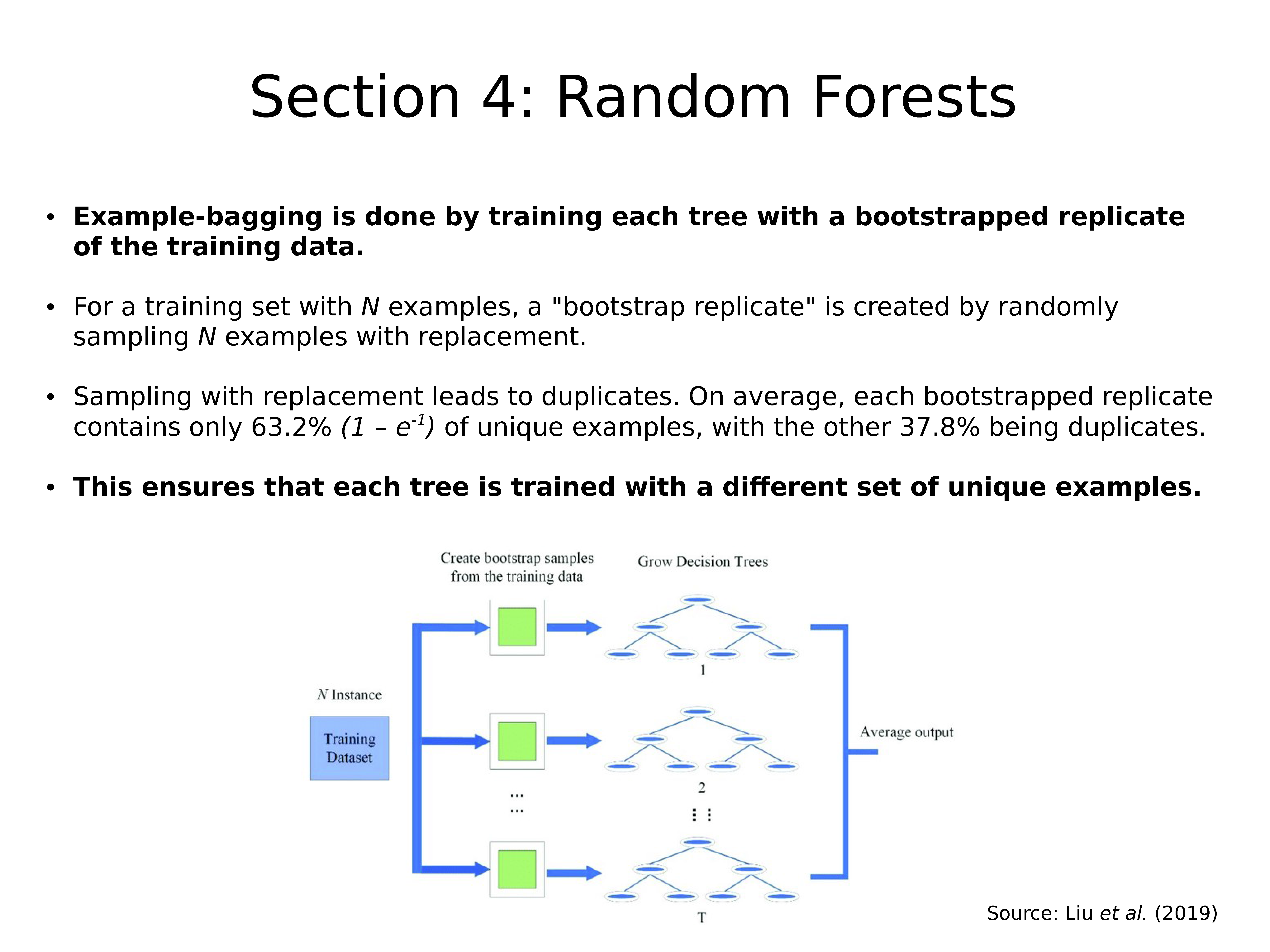
通过使用训练数据的自举副本训练每棵树来完成 Example-bagging。
对于具有 N 个样本的训练集,通过随机采样 N 个可替换的样本来创建 “bootstrap replicate”。
替换采样导致重复。 平均而言,每个引导复制都仅包含63.2%(1 – e^-1)的唯一样本,其他 37.8% 是重复的。
这样可以确保每棵树都以不同的唯一样本集进行训练。
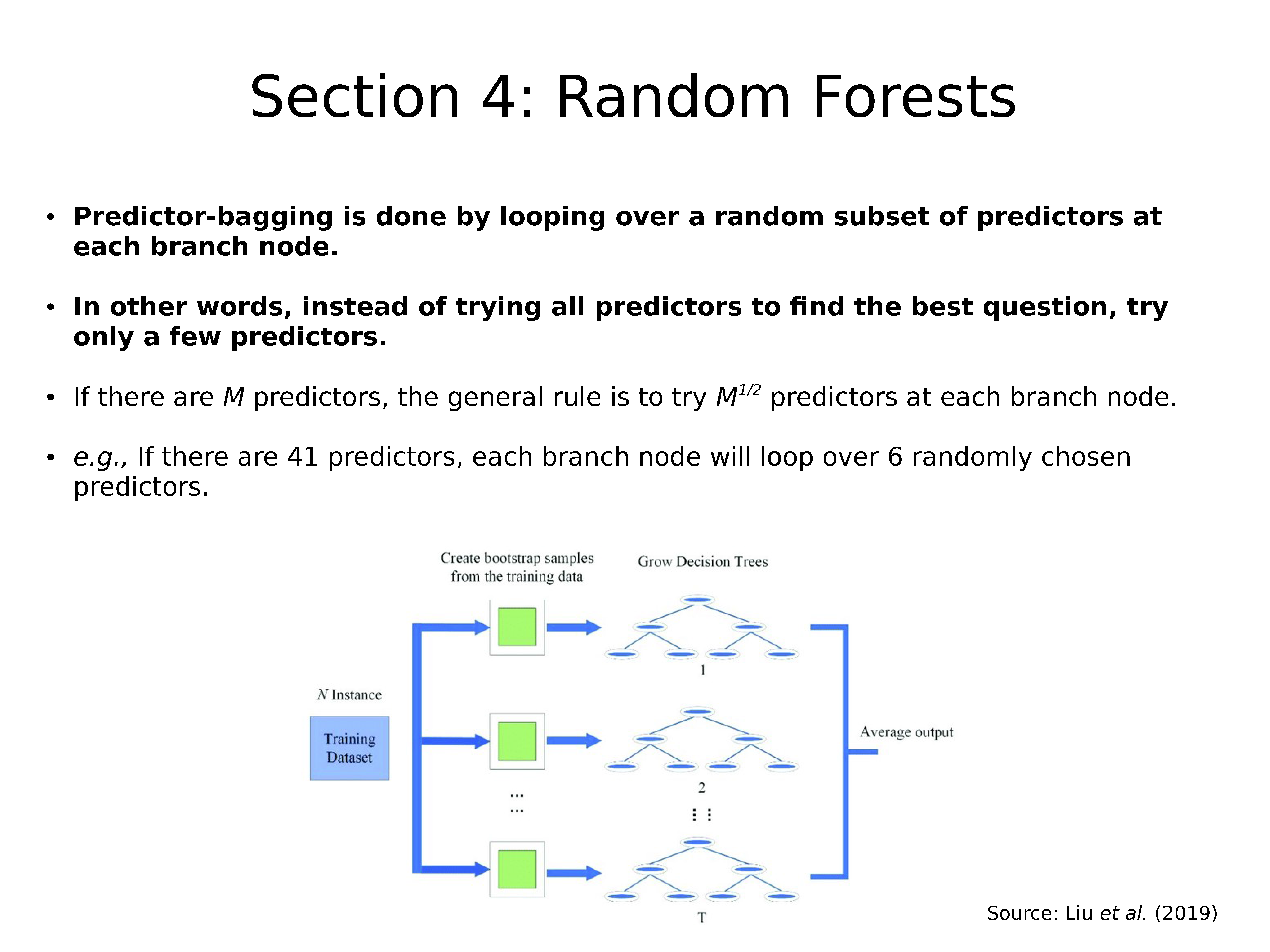
通过在每个分支节点上循环随机的预测变量子集来完成 Predictor-bagging。
换句话说,不要尝试所有预测变量找到最佳问题,而只尝试几个预测变量。
如果有 M 个预测变量,则一般规则是在每个分支节点尝试 M^(1/2) 个预测变量。
例如,如果有 41 个预测变量,则每个分支节点将循环遍历 6 个随机选择的预测变量。
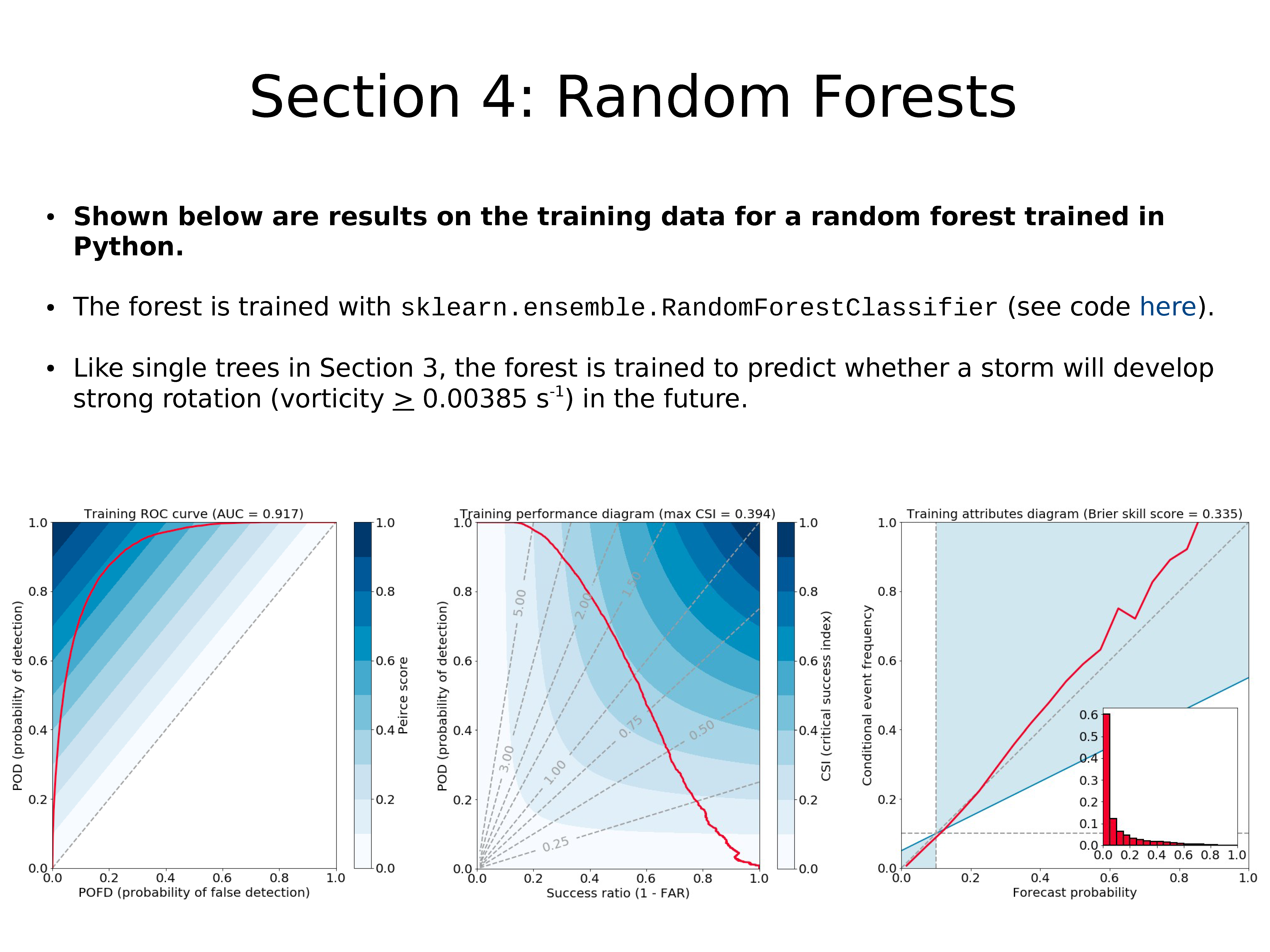
上面显示的是使用 Python 训练的随机森林的训练数据的结果。
使用 sklearn.ensemble.RandomForestClassifier 训练森林(代码)。
像上一节中的单棵树一样,对森林进行训练以预测未来暴风雨是否会形成强旋转(涡度 > 0.00385s-1)。

上图:同一森林在验证数据上的结果。
技巧上的很小变化表明,与单棵树不同,随机森林并没有严重过拟合:
- AUC 下降 0.004
- 最大 CSI(在性能图中显示)增加 0.007
- Brier 技巧评分(在属性图中显示)下降 0.007
- 这些差异可能都不具有统计学意义!
梯度提升森林
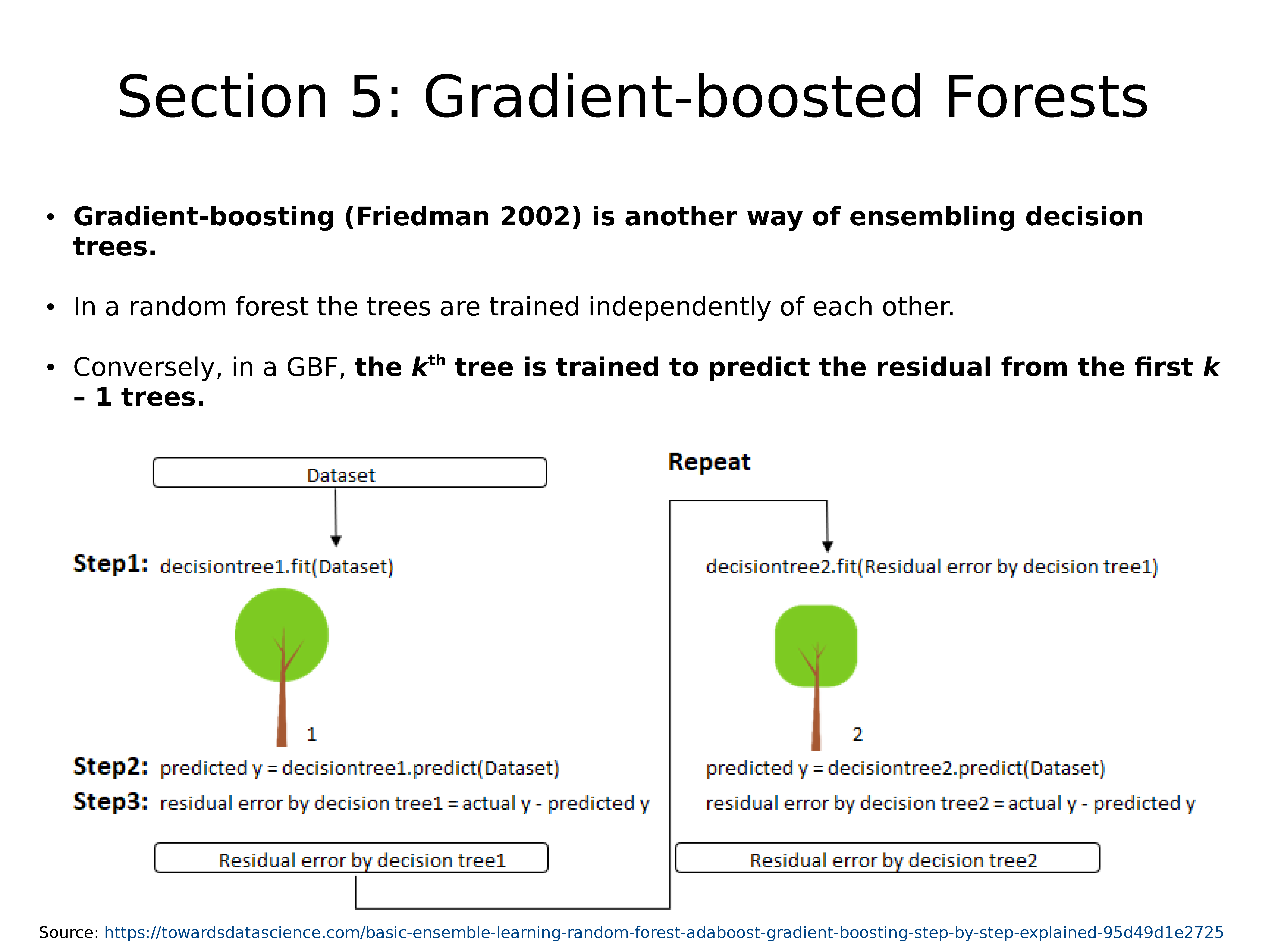
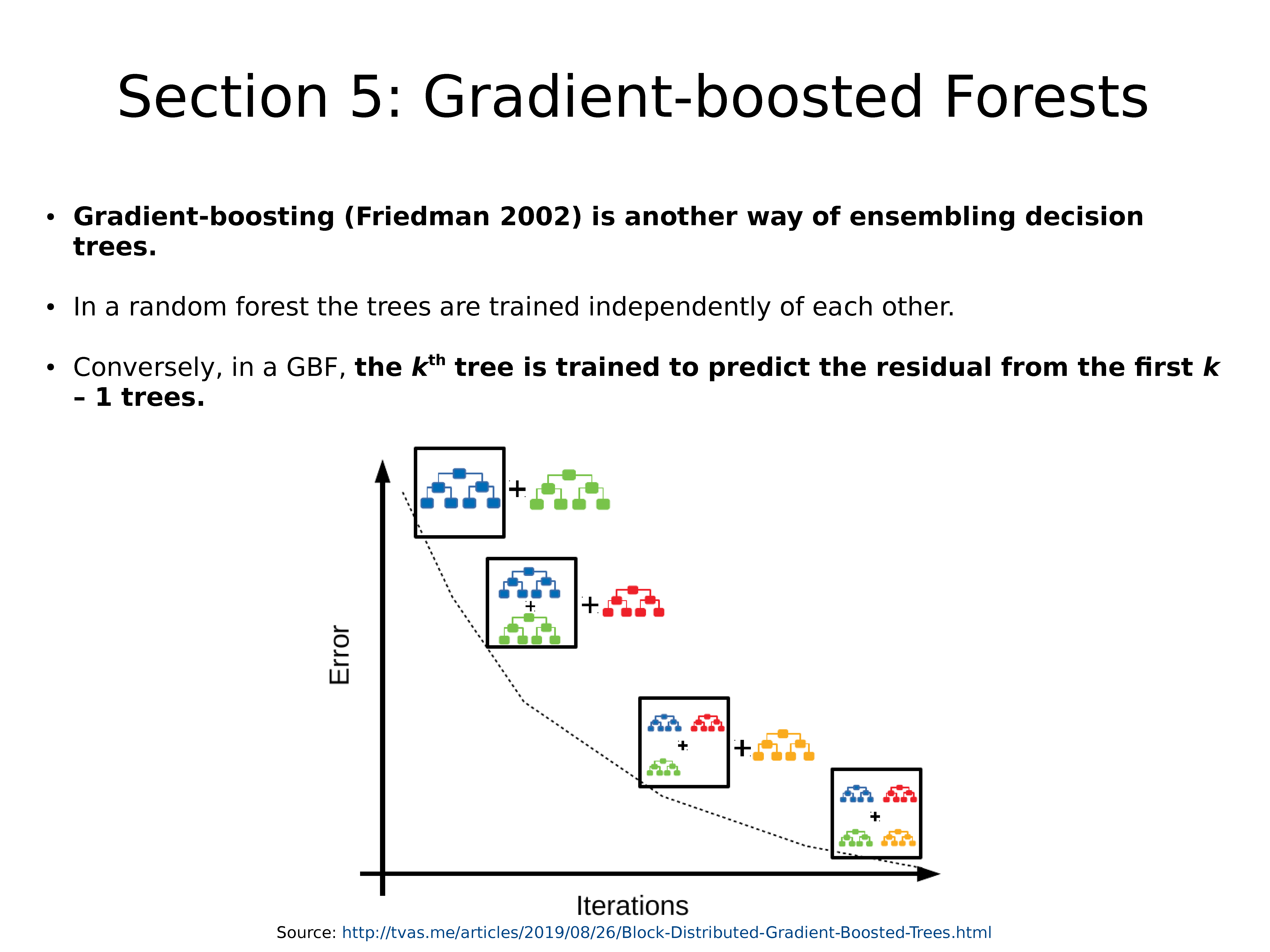
梯度增强(Gradient-boosting)(Friedman 2002)是组合决策树的另一种方法。
在随机森林中,树木彼此独立训练
相反,在GBF中,训练第 k 棵树以预测前 k-1 棵树的残差。

GBF 同样可以使用 example-bagging 和 predictor-bagging
但是,在大多数库中,默认设置都不使用 example-bagging 或 predictor-bagging。 而是使用所有样本训练每棵树,并在每个分支节点尝试所有预测变量。
在随机森林中,可以并行训练树木(每棵树木彼此独立),这使随机森林更快。
在GBF中,必须对树木进行串行训练,这会使它们变慢。
但是,实际上,GBF 通常会胜过随机森林。
在最近的太阳能预测竞赛中,排名前三的团队都使用了 GBF(McGovern等人,2015)。
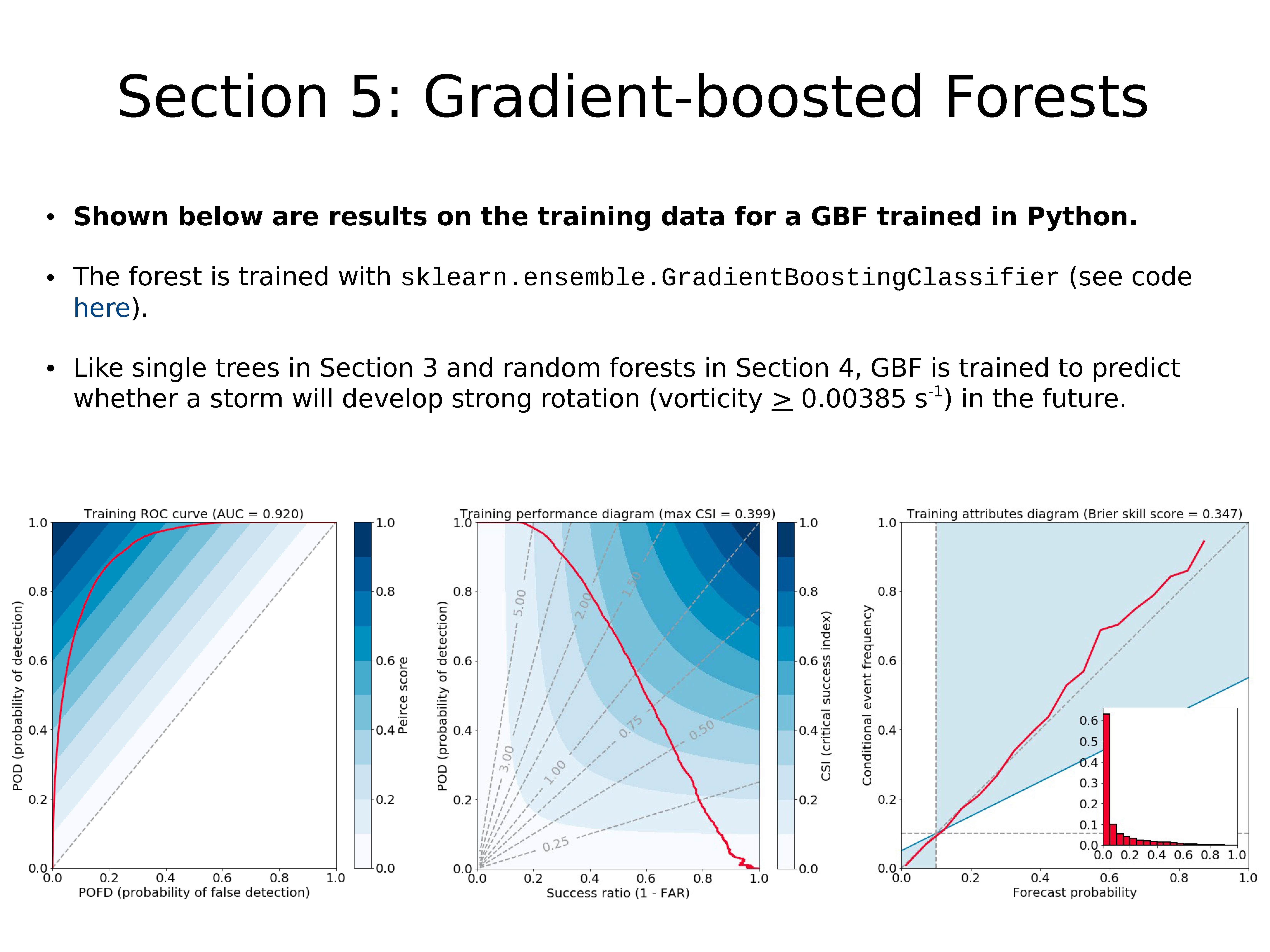
下面显示的是使用 Python 训练的 GBF 在训练数据上的结果。
使用 sklearn.ensemble.GradientBoostingClassifier 训练森林(代码)。
像上一节中的单棵树和本节中的随机森林一样,GBF 经过训练可以预测暴风雨将来是否会形成强旋转(涡度 > 0.00385s-1)。

上图:相同 GBF 在验证数据上的结果。
像随机森林一样,但与单树不同,GBF 并没有严重地过拟合:
- AUC 下降 0.008
- 最大 CSI(在性能图中显示)增加 0.001
- Brier 技巧评分(在属性图中显示)下降 0.022
- 这些差异可能都不具有统计学意义!
GBF 的验证结果比随机森林的验证结果稍差(但同样,差异可能并不明显)。
总结

决策树可以使用一系列是或不是问题来解决回归或分类问题
决策树的主要优点:可读性强
主要缺点:它们通常过拟合
可以通过使用随机或梯度增强的森林集合决策树来减轻过拟合情况。
森林的劣势:人类难以理解。虽然可以理解单个树,但森林通常有数百棵树
您可以在此处找到所有实验的交互式代码:
决策树和森林在大气科学中的应用:
- https://link.springer.com/content/pdf/10.1007/s10994-013-5346-7.pdf
- https://link.springer.com/content/pdf/10.1007/s10994-013-5343-x.pdf
- https://journals.ametsoc.org/waf/article/30/6/1781/40289
- https://journals.ametsoc.org/waf/article/32/6/2175/41018
- https://journals.ametsoc.org/jamc/article/57/7/1575/68277
- https://journals.ametsoc.org/waf/article/35/2/537/345548
- https://journals.ametsoc.org/waf/article/32/5/1819/41181
参考

Breiman, L., 2001: “Random forests.” Machine Learning, 45 (1), 5–32, https://link.springer.com/content/pdf/10.1023/A:1010933404324.pdf.
Chisholm, D., J. Ball, K. Veigas, and P. Luty, 1968: “The diagnosis of upper-level humidity.” Journal of Applied Meteorology, 7 (4), 613-619.
Friedman, J., 2002: “Stochastic gradient boosting.” Computational Statistics and Data Analysis, 38 (4), 367–378, https://www.sciencedirect.com/science/article/abs/pii/S0167947301000652.
McGovern, A., D. Gagne II, J. Basara, T. Hamill, and D. Margolin, 2015: “Solar energy prediction: An international contest to initiate interdisciplinary research on compelling meteorological problems.” Bulletin of the American Meteorological Society, 96 (8), 1388- 1395, https://journals.ametsoc.org/bams/article/96/8/1388/69447.
Quinlan, J., 1986: “Induction of decision trees.” Machine Learning, 1 (1), 81–106, https://link.springer.com/article/10.1007/BF00116251.